ISSAI зерттеушілері IEEE Access журналында роботты жүйелер үшін оқытуды күшейту туралы алғашқы мақаласын жариялады.
Мақала авторлары Айдар Шәкерімов, Тохид Ализаде және Хусейн Атакан Варол домен мен рандомизацияға бейімдеуді біріктіру арқылы білімді модельдеуден нақты ортаға көшіру мәселесінің жаңа шешімін ұсынады.
Әдістің тиімділігі әртүрлі модельдерді, соның ішінде тірек арбаны, қарапайым маятникті, төрт аяқты роботты және робот құмырсқаны қолданатын модельдеу арқылы көрсетілді.
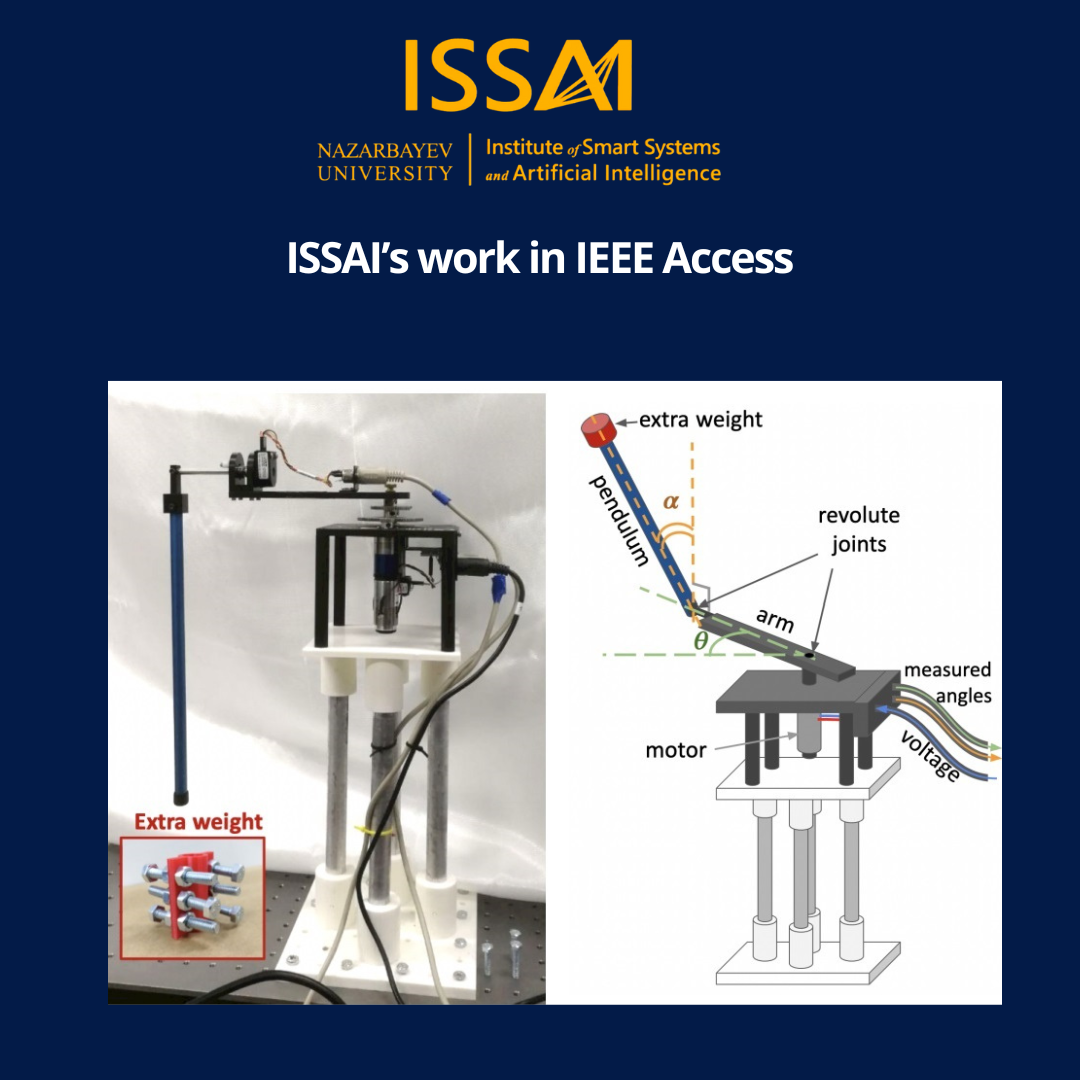
Одан әрі әдіс айналмалы инверттелген маятник үшін күшейтілген оқытуға негізделген нақты әлемді басқаруды оқытуға қолданылады.
Болжам бойынша, зерттеу, нақты әлемде роботтарды басқару үшін жасанды интеллектке негізделген оқытуды күшейту алгоритмдерін пайдалануға мүмкіндік береді.