ISSAI researchers published their first paper on reinforcement learning for robotic systems in IEEE Access. The paper, authored by Aidar Shakerimov, Tohid Alizadeh and Huseyin Atakan Varol, proposes a new solution for the sim-to-real transfer problem by combining domain adaptation and randomization. The method’s efficacy is demonstrated through simulations with various models (a cart pole, a simple pendulum, a quadruped, and an ant robot).
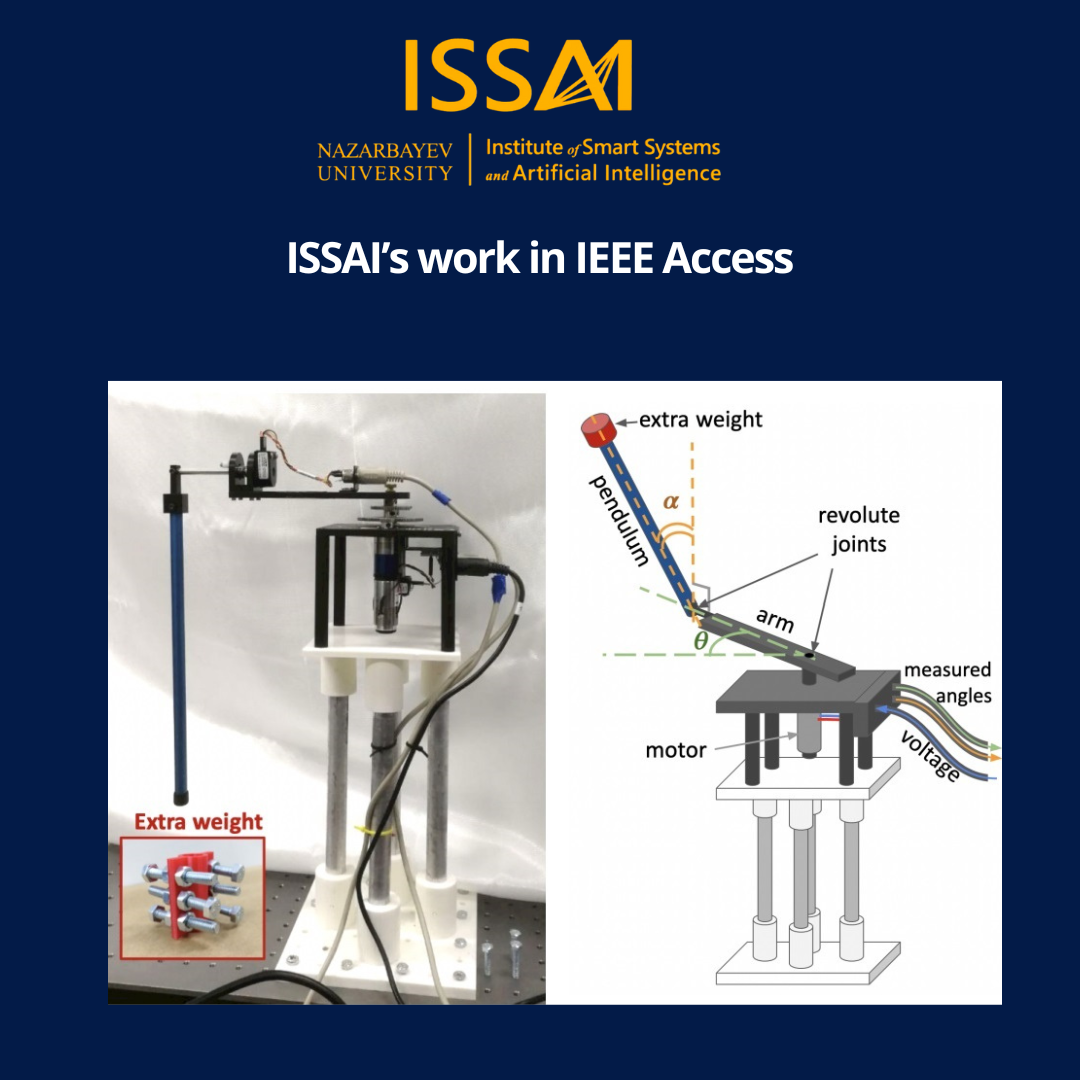
Afterward, the method is applied for the reinforcement learning-based control of a rotary inverted pendulum in the real-world. Presumably, the research will enable the usage of AI-based RL algorithms for real-world robot control.