Aknur Karabay, Arman Bolatov, Huseyin Atakan Varol, Chan, Mei-Yen Chan
Askat Kuzdeuov, Darina Koishigarina, Huseyin Atakan Varol
Daniil Orel, Rustem Yeshpanov, Huseyin Atakan Varol
Mr Batyr Arystanbekov, Mr Askat Kuzdeuov, Mr Shakhizat Nurgaliyev, Prof Huseyin Atakan Varol
Rustem Yeshpanov, Saida Mussakhojayeva, Yerbolat Khassanov
Zhanat Makhatayeva, Tolegen Akhmetov, Huseyin Atakan Varol
Daniil Orel, Huseyin Atakan Varol
Zarema Balgabekova; Muslim Alaran; Huseyin Atakan Varol
Aidar Shakerimov, Alizadeh Tohid, and Huseyin Atakan Varol
Madina Abdrakhmanova, Timur Unaspekov and Huseyin Atakan Varol
Askat Kuzdeuov, Shakhizat Nurgaliyev, Diana Turmakhan, Nurkhan Laiyk, Huseyin Atakan Varol
Tolegen Akhmetov, Gourav Moger, Iliyas Tursynbek, Huseyin Atakan Varol

Madina Abdrakhmanova, Saniya Abushakimova, Yerbolat Khassanov, Huseyin Atakan Varol
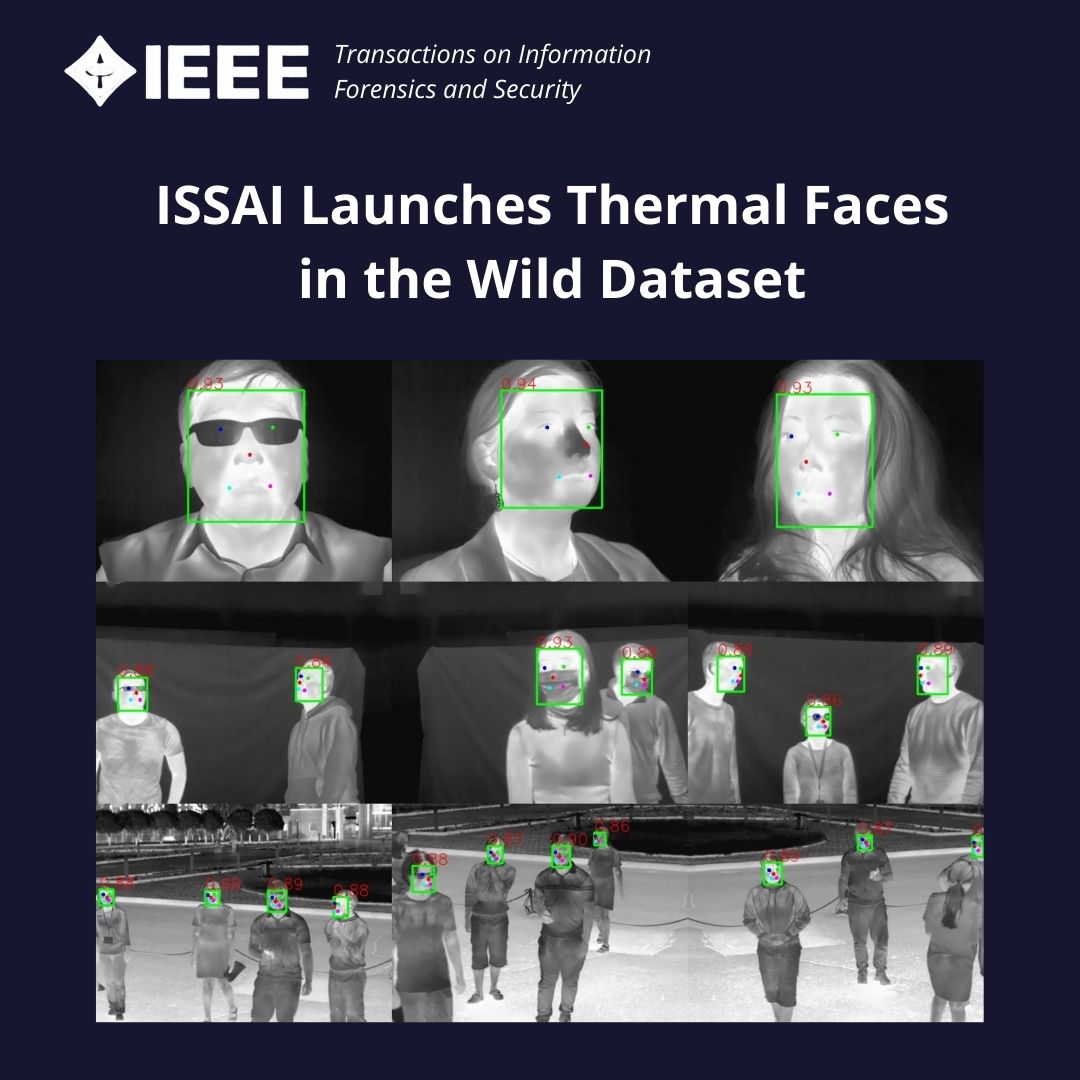
Askat Kuzdeuov, Dana Aubakirova, Darina Koishigarina, Huseyin Atakan Varol

Rustem Yeshpanov, Yerbolat Khassanov, Huseyin Atakan Varol
Saida Mussakhojayeva, Yerbolat Khassanov, Huseyin Atakan Varol

Askat Kuzdeuov, Darina Koishigarina, Dana Aubakirova, Saniya Abushakimova, Huseyin Atakan Varol

Dinmukhammed Mukashev, Nurdaulet Zhuzbay, Ainur Koshkinbayeva, Bakhtiyar Orazbayev, Zhanat Kappassov

Tolegen Akhmetov; Huseyin Atakan Varol